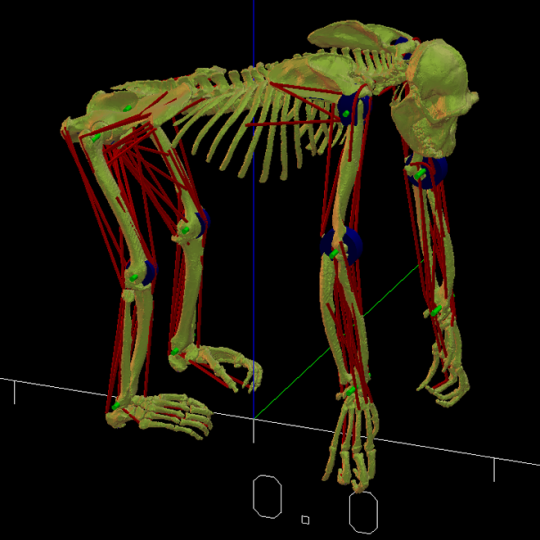
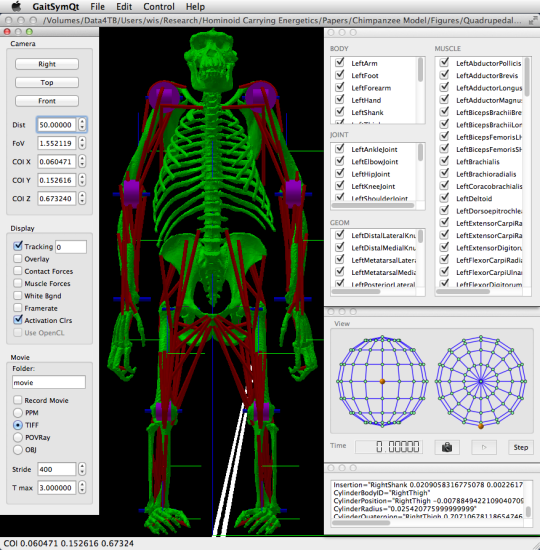
GaitSym is een voorwaartse dynamische modellering programma. Wat dat betekent is dat je de krachten te geven en het programma maakt gebruik van de wetten van Newton om de bewegingen te berekenen. U kunt het downloaden vanaf hier, waaronder een scala van menselijke en niet-menselijke 2D- en 3D-modellen om mee te beginnen. Het maakt gebruik van de Open Dynamics Engine physics engine om het grootste deel van het harde werk te doen en biedt een bestandsformaat en display systeem, zodat de gebruiker niet hoeft te programmeren doen. Het biedt ook diverse spiermodellen zodat de krachten direct worden gegenereerd uit spieractivatie niveaus en een aantal haken om deze te gebruiken bij globale optimalisering, zoals genetische algoritmen. De belangrijkste kenmerken zijn: snel, flexibel en robuust Forward Dynamic Modeller; Verfijnde Contact Systeem; Minetti-Alexander en Umberger-Gerritsen-Martin Muscle Modellen voor Metabole Kostenraming; Via Points en Cilinder inpakken voor Muscle Paths; Inertiële Tensor Berekend op basis van Driehoekige Mesh Outline; Wereld of Lokale Coördinatensystemen voor Efficient Model Schepping. Volledige broncode inbegrepen (C ++ compileert op MacOSX, Windows, Linux en andere Unix-systemen); Compleet met een verscheidenheid van menselijke en niet-menselijke 2D- en 3D-modellen; Produceert hoogwaardige Stills en Animaties via externe Ray-tracing
Wat is nieuw in deze release:.
Versie 2013:
- Nieuwe slider joint;
- New spiermodel waaronder pees demping activatie kinetiek, niet-lineaire veer respons en betere numerieke stabiliteit;
- Nieuwe doos automobilisten;
- Nieuwe doos geom;
- Nieuwe spier band die kunnen wikkelen rond twee parallelle cilinders;
- Direct puntenwolk visualisatie;
- Aborteer op excessieve scharniergewricht limiet koppels, of op gegevens doel drempels;
- De tracking positie kan worden gecompenseerd met rupsbanden simulaties te centraliseren.

Reacties niet gevonden